Fahrerlose Transportsysteme
Kollaboration Mensch – autonomer mobiler Roboter
Der Automatisierungsgrad in produzierenden Unternehmen steigt mit der zunehmenden Akzeptanz fahrerloser Transportsysteme und autonomer mobiler Roboter rasant an. Die in diesem Artikel dargestellten Präventionsmaßnahmen sowie die Einhaltung von Sicherheitsanforderungen minimieren Gefahren in der Produktion und bei Prozessen.

Fahrerlose Transportfahrzeuge (FTF) bewähren sich seit den 50er-Jahren in der Industrie beim zuverlässigen Transport von Rohstoffen und Fertigprodukten. Erst im letzten Jahrzehnt sind autonome mobile Roboter (AMR) vermehrt in die Industrie eingezogen, angetrieben durch die Forderung nach mehr Flexibilität und optimierten Routen, jedoch mit neuen Gefahren für Mitarbeiter:innen.
Unterschiede sichtbar machen
Ein FTF ist ein bodengebundenes Fahrzeug (Flurförderzeug) mit eigenem Antrieb und eigener Steuerung. Es ist mit einer an die Umgebung angepassten Sensorik ausgestattet und navigiert mit Hilfe von Markierungen, Magneten, Induktionsschleifen, Laser und Reflektoren oder anderen Umgebungsmerkmalen. Das FTF kann sich auf einer vorgegebenen und markierten Strecke und auf getesteten sicheren Routen bewegen.
Ein AMR ist ebenfalls ein Flurförderzeug. Ausgestattet mit mindestens einem Antrieb und mindestens drei Rädern, Sensorik und Steuerung bewegt er sich autonom über freigegebene Flächen. Zur Navigation verwenden AMR meistens die SLAM-Methode (Simultaneous Localization and Mapping). Ein oder mehrere Laserscanner sowie weitere Sensoren auf der mobilen Plattform erfassen zyklisch die Umgebung. Die Fahrzeugsteuerung verwendet die existierenden Konturen von Wänden, Säulen, Maschinen usw., um die aktuelle Position basierend auf einer vorher aufgezeichneten digitalen Landkarte zu berechnen. Klar gekennzeichnete, unverrückbare Elemente in den Karten sind entscheidend, um dem Fahrzeug in jeder Position die korrekte Orientierung zu ermöglichen. Der Laserscanner dient meist gleichzeitig als Sicherheitssensor und der Navigation.
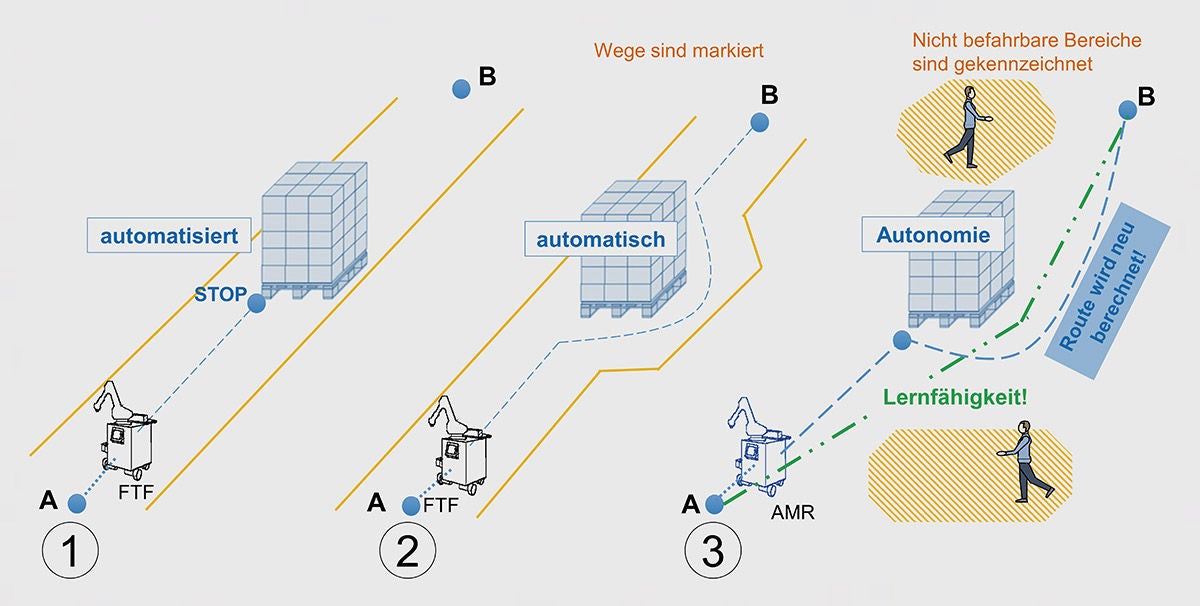
Abb. 1 veranschaulicht den Hauptunterschied zwischen FTF und AMR, die Handhabung von erkannten Hindernissen auf der befahrenen Route. In Abb. 1, Pos. 1 wird die Standardkonfiguration des FTF dargestellt: Wenn ein Hindernis erkannt wird, stoppt das FTF und aktiviert ein Warnsignal. Wird das Hindernis entfernt, setzt das FTF seine geplante Fahrt fort.
Bestimmte Streckenabschnitte können so gestaltet werden, dass das FTF ausreichend Platz zum Umfahren von Hindernissen hat. In Abb. 1, Pos. 2 wurde z. B. festgelegt, dass das FTF das Hindernis nur auf der rechten Seite umfahren und bis zu 2 m von der ursprünglichen Route abweichen darf. Kann es das Hindernis dennoch nicht umfahren, wird das FTF wie im vorherigen Fall anhalten, bis das Hindernis beseitigt ist.
AMR bewegen sich auf Flächen und auf markierten Strecken, z. B. an Kreuzungen mit anderen Verkehrswegen. Bei der Erkennung eines Hindernisses auf der Route wird gleich eine neue Strecke berechnet, wie in Abb. 1, Pos. 3 dargestellt.
Wenn bei der Berechnung zukünftiger Routen auch zuvor erfasste Hindernisse berücksichtigt werden, spricht man von einem lernfähigen System. Automatisch generierte Routen des AMR sind für Arbeitnehmer:innen nicht vorhersehbar und können an nahe gelegenen Arbeitsplätzen und beim Überqueren von Verkehrsflächen zu Ablenkung, Erschrecken und erhöhtem Stress führen.
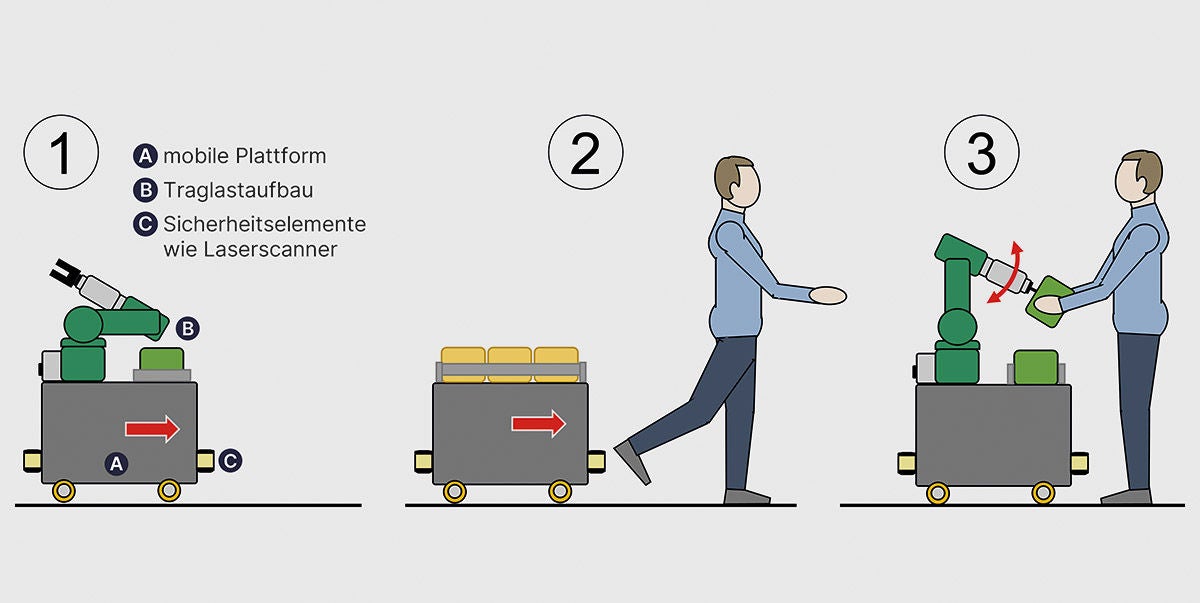
Abb. 2, Pos. 1 zeigt den Traglastaufbau eines AMR in Form eines Industrieroboters. Ein so ausgestatteter AMR kann z. B. ein Werkstück selbstständig von einem Transportband entnehmen und auf der mobilen Plattform ablegen, den Industrieroboter in Transportposition bringen und über eine berechnete Route z. B. zur Maschine oder zu einem manuellen Arbeitsplatz bringen, unaufgefordert oder vom Bedienpersonal angefordert.
Abb. 2, Pos. 2. zeigt einen AMR im Kollaborationsbetrieb mit der mobilen Plattform, der dem Menschen folgt. Solche AMR werden meistens zur Kommissionierung von Produkten eingesetzt: Schuhkartons, Pharmaprodukte, Lebensmittel o. ä. werden manuell aus Regalen entnommen und auf der mobilen Plattform gesammelt. Der AMR folgt der Bedienperson in einem bestimmten Abstand, empfohlen wird ein Meter.
Mit einem AMR, der einen Industrieroboter integriert und dessen System für die Kollaboration mit dem Menschen vorbereitet ist, entsteht ein besonders flexibler und wandlungsfähiger Arbeitsplatz (siehe Abb. 2, Pos. 3). Solch ein AMR kann ein Werkobjekt aus dem Lager an einen bestimmten Arbeitsplatz bringen und dort in der Zusammenarbeit mit einem Roboter in kollaborierender Betriebsart z. B. eine zusätzliche Montage durch die Fachkraft durchführen. Nach der Fertigstellung kann der AMR das fertige Produkt zurück ins Lager bringen und abladen oder an einen anderen Arbeitsplatz zur weiteren Bearbeitung bringen.
Zussammenfassung
Der Automatisierungsgrad und damit auch die Gefahrenquellen in produzierenden Unternehmen steigt. Handhabung und Aufgaben fahrerloser Transportsysteme (FTS) und autonomer mobiler Roboter (AMR) sind unterschiedlich, laufen aber im industriellen Umfeld parallel ab. Praxisbeispiele veranschaulichen eine sichere Integration in den bestehenden innerbetrieblichen Verkehr.