Robotik
Mensch und Maschine arbeiten zusammen
Die sogenannte Mensch-Roboter-Kollaboration (MRK) ist gerade dabei, neue Anwendungen zu erschließen bzw. das Einsatzgebiet der Robotik deutlich zu erweitern. Arbeiteten Industrieroboter früher abgeschirmt hinter Schutzeinrichtungen, so führen die neuen sensitiven Manipulatoren Tätigkeiten in Zusammenarbeit mit dem Menschen durch. Dies stellt auch die Sicherheitsverantwortlichen vor neue Herausforderungen.
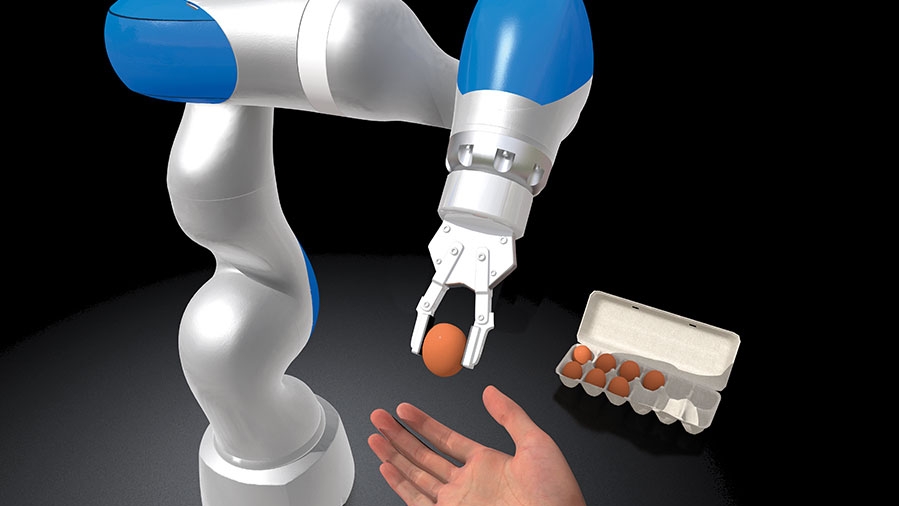
Bislang wurden Industrieroboter hinter Schutzzäunen betrieben, um die Sicherheit des Menschen stets zu gewährleisten. Durch weitreichende Fortschritte bei Technologien, die in der Roboterentwicklung zum Einsatz kommen, eröffnet sich zurzeit mit der kollaborativen Robotik ein neues Fachgebiet der Industrierobotik. In dessen Mittelpunkt steht eine neue Klasse an Industrierobotern, die sogenannten sensitiven Manipulatoren. Anhand ihrer erweiterten Fähigkeit zur Umgebungswahrnehmung können sie äußere Einflüsse, wie z. B. den physischen Kontakt mit einem Menschen, detektieren und entsprechend darauf reagieren. Sie ermöglichen somit einen breiteren Einsatz und erschließen zeitgleich gänzlich neue Anwendungsgebiete. Anwendungen, in denen der Roboter mit dem Menschen zusammen an einer Aufgabe arbeitet, werden als Mensch-Roboter-Kollaboration (MRK) bezeichnet. Durch ihre Zusatzfunktionalität können sie außerdem in manchen Bereichen klassische Industrieroboter ersetzen, z. B. bei Fügeprozessen. Kollaborative Roboteranwendungen können sich einerseits direkt auf die Qualität des Endproduktes und andererseits positiv auf die Ergonomie für den Menschen am Arbeitsplatz auswirken.
Neben dem Einsatz in klassischen Industrieanwendungen eröffnen sensitive Roboter auch die Möglichkeit für die sogenannte mobile Manipulation. In dieser Klasse sind die Robotersysteme nicht mehr ortsgebunden, sondern können sich frei im Raum bewegen und autonom navigieren.
Derzeit hohe Sicherheit bei Roboteranwendungen
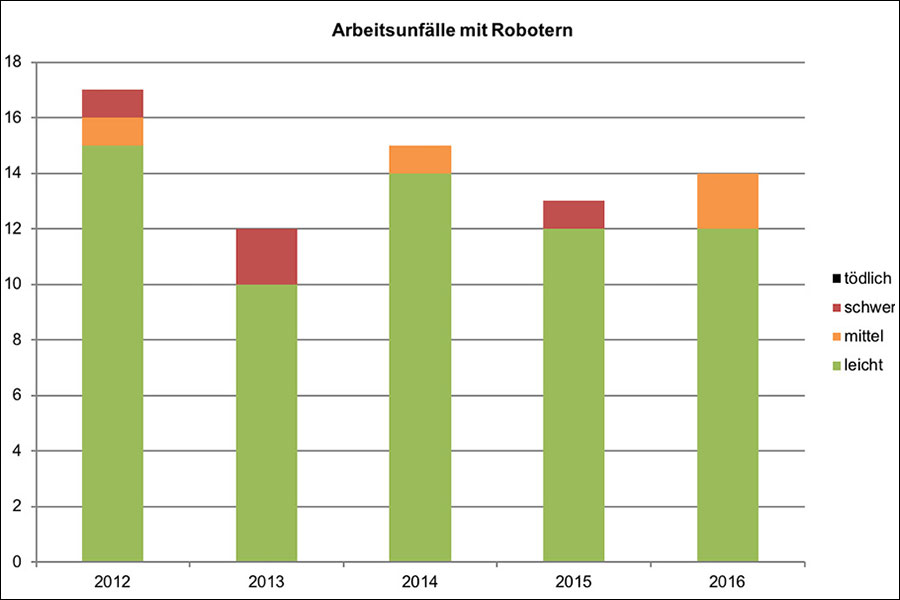
Die aktuelle Arbeitsunfallstatistik zeigt, dass die geltenden Vorgaben für die Integration von klassischen Industrierobotern wirksam sind. Im Jahr 2015 waren, laut der International Federation of Robotics (IFR), 128 Roboter pro 10.000 Beschäftigte in Österreich im Einsatz (EU-Ø: 92).
Dem gegenüber stehen 13 Arbeitsunfälle im Zusammenhang mit Robotern im selben Jahr (siehe Abb. 1), wobei der Großteil davon einer leichten Verletzung zuzuschreiben ist. Gegenwärtig sind die neuen, kollaborativen Roboteranwendungen bisher nur in geringem Maße in der Industrie vertreten. Aus diesem Grund sagt obige Statistik nichts über deren Sicherheit aus. Damit Unfälle mit Robotern weiterhin die Ausnahme bleiben, muss gerade bei MRK-Anwendungen ein großer Wert auf die Sicherheit gelegt werden, da sich Mensch und Roboter in unmittelbarer Nähe befinden. Weil die Arbeitsbereiche zwischen Mensch und Roboter nicht mehr strikt getrennt sind, ergeben sich neben den Chancen für Ergonomie und Effizienz auch neue potenzielle Gefahren, die zu berücksichtigen sind.
Hohes Sicherheitsniveau auch für die Zukunft angestrebt
Um die bisherige Sicherheit in der Robotik auf diese neuartigen MRK-Anwendungen zu übertragen, müssen einige Beurteilungsaspekte überdacht und teilweise auch angepasst werden. Zu diesem Zweck hat das Institut ROBOTICS der JOANNEUM RESEARCH Forschungsgesellschaft mbH im Auftrag der AUVA mögliche Ursachen von Arbeitsunfällen und Risiken im Anwendungskontext der kollaborativen Robotertechnik untersucht. Ein Ziel dieses Projekts war es, die aktuellen Entwicklungen der Mensch-Roboter-Kollaboration (MRK) im industriellen Umfeld zu erfassen. Es wurden dazu sowohl Anwendungen mit stationären als auch mit mobilen Robotern aus Industrie und Forschung betrachtet. Ausgehend von den gesammelten Informationen sollten mögliche Risiken für den Menschen identifiziert und Handlungsanweisungen sowie Hilfestellungen für Interessengruppen, unter Berücksichtigung aktueller Sicherheitstechnik und zukünftigen Entwicklungen, erarbeitet werden.
Neben einem Forschungsbericht sind zwei Merkblätter entstanden, die in Kürze erscheinen werden. Das Merkblatt „Arbeiten mit kollaborativen Robotern“ richtet sich an die Bedienerinnen und Bediener von MRK-Anwendungen und erklärt, welche Gefahren bei der täglichen Arbeit mit einem Roboter entstehen können und wie man sich verhält, um das Risiko zu minimieren. In Ergänzung mit dem Merkblatt „Integration kollaborativer Robotikanwendungen“ werden Fragestellungen von Integratoren und Betreibern von MRK-Anwendungen adressiert. Neben der Aufarbeitung der rechtlichen und technologischen Rahmenbedingungen werden unter anderem Lösungsansätze gegeben, wie Gefahren während des Betriebs schon durch das Anwendungsdesign ausgeschlossen werden können. Zur abschließenden Beurteilung von MRK-Anwendungen wurde jeweils eine Checkliste für mobile und stationäre Anwendungen entworfen, mit deren Hilfe die Sicherheit abgeschätzt werden kann.
Wie sicher sind MRK-Anwendungen?
Im Rahmen des Projekts wurden zunächst aktuell verfügbare und kurz vor der Markteinführung stehende Komponenten speziell für industrielle MRK-Anwendungen katalogisiert. Die verfügbaren stationären sensitiven Manipulatoren sind in ihrer Entwicklung weit vorangeschritten. Die Modelle der unterschiedlichen Anbieter ähneln sich äußerlich und können im Allgemeinen mit Kontaktsituationen zwischen Mensch und Roboter umgehen. Weniger Auswahl bietet der Markt für mobile Manipulatoren.
Die verfügbaren intelligenten mobilen Roboter für den industriellen Einsatz sind eine jüngere Entwicklung und die einzelnen Modelle weisen starke Unterschiede im Design und in der Funktionalität auf. Im Bereich der Endeffektoren wird zum einen versucht, klassische Greifer für den MRK-Einsatz zu modifizieren, zum anderen werden neue, alternative Konzepte entwickelt. Unter Berücksichtigung zukünftiger Produktionsumgebungen und der unterschiedlichen Funktionen der verfügbaren Komponenten, wurden potenzielle Gefährdungssituationen und Risiken für Menschen, die mit Robotern arbeiten, identifiziert. Die rechtliche Grundlage für die Entwicklung und das Inverkehrbringen von industriellen Roboteranwendungen bildet die Richtlinie 2006/42/EG des Europäischen Parlaments und des Rates (die sogenannte Maschinenrichtlinie), welche in Österreich durch die Maschinen-Sicherheitsverordnung 2010 umgesetzt wird.
Neben der Industrieroboter-Norm ISO 10218 ist speziell für kollaborative Roboteranwendungen die Technische Spezifikation ISO/TS 15066 relevant. Die genannten Normen und Gesetze bilden die Grundlage für eine Risikobeurteilung für alle Lebensphasen der Anwendung und ermöglichen somit eine systematische Untersuchung von Gefährdungssituationen. Gerade der Betrieb von mobilen Robotern birgt Gefahren, die bei klassischen Roboteranwendungen bisher nicht relevant waren. Im Besonderen kann die Autonomie hinsichtlich der örtlichen Verlagerung zu kritischen Situationen führen. Bei allen Robotern, die mit dem Menschen zusammenarbeiten, stellt die Kollision zwischen Roboter und Bedienerin bzw. Bediener eine große Gefahr dar, die unbedingt berücksichtigt werden muss.
Neue Herausforderungen an die Prävention
Aufbauend auf den potenziellen Gefahren der neuen Roboter-Generation wurden im Rahmen des Projekts verschiedenste Möglichkeiten zur Prävention von Arbeitsunfällen untersucht. Für die Absicherung von MRK-Anwendungen stehen unterschiedliche konstruktive, ergänzende und organisatorische risikosenkende Maßnahmen zur Verfügung. Es ist dabei wichtig, sowohl verfügbare Funktionalitäten, aber auch die Technologien hinter den Produkten zu verstehen, um ein Verständnis für deren Potenzial zu erlangen. Ergänzende technische Schutzmaßnahmen benötigen in der Regel Sensoren, um in geeigneter Weise zu reagieren.
Während bei stationären Anwendungen durch das Layout manche Gefahren einfach ausgeschlossen werden können, sind besonders mobile Roboter aufgrund der oft teil- bis unstrukturierten Umgebung, in welcher sie sich sicher bewegen müssen, auf zusätzliche Sensordaten angewiesen. Neben klassischer Sicherheitstechnik wie Lichtschranken und Laserscanner ist der Roboter selbst mit immer mehr Sensorik ausgestattet. Mit Momentensensoren in den Gelenken werden Berührungen erkannt und Sensoren auf der Außenhülle des Roboters werden verwendet, um die Anwesenheit von Menschen und Objekten, teils berührungslos, wahrzunehmen. Durch diese zusätzlichen Fähigkeiten sind Anwendungen möglich, bei denen der Roboter nicht mehr nur ein und dieselbe Bewegung ausführt, sondern dynamisch auf seine Umwelt und den Menschen reagiert.
Schnittstelle zwischen Mensch und Roboter
Als wichtiger Punkt bei der Entwicklung und Integration von MRK-Anwendungen wurde die Schnittstelle zwischen Mensch und Roboter identifiziert. Die Kommunikation und Arbeitsteilung kann meist auf unterschiedlichste Weise gestaltet werden und kann damit die Sicherheit sowohl positiv als auch negativ beeinflussen. Die hohe technische Komplexität von kollaborativen Arbeitsplätzen in Kombination mit der Forderung nach einer einfachen Bedienung erfordert ein gutes Interface zwischen Mensch und Roboter. Dies beinhaltet die Gestaltung von physischen Interaktionsmöglichkeiten wie den Endeffektor genauso wie grafische Benutzer-Oberflächen.
Unter Berücksichtigung der prinzipiellen Möglichkeiten und Probleme der Interaktion sowie der Bedürfnisse der Anwenderinnen und Anwender kann die Gestaltung der Zusammenarbeit gelingen. Wichtig ist, dass die Arbeitsschritte des Roboters für die Bedienerinnen und Bediener vorhersehbar und transparent sind. Weiterhin sollten nur wirklich wichtige und zum aktuellen Kontext passende Informationen auf geeignete Art und Weise kommuniziert werden. Dies lenkt die Aufmerksamkeit nicht unnötig von der eigentlichen Arbeit ab, reduziert Stress, fördert damit die Gesundheit und senkt das Risiko von Gefahrensituationen.
Sichere Integration angestrebt
Mit diesem Projekt wurden die aktuellen Entwicklungen im Bereich der Sicherheit von MRK-Anwendungen zusammengetragen und in konkrete Empfehlungen für eine sichere Zusammenarbeit und Integration überführt. Während der Arbeit wurde deutlich, dass die Entwicklungen schnell voran schreiten und immer neue Lösungen für die kommerzielle Verwendung in der Industrie bereit stehen. Die vielen unterschiedlichen Robotermodelle machen es schwer, die Sicherheit von Anwendungen zu überprüfen ohne die Funktionsweise der Komponenten und deren Zusammenspiel genau zu kennen. Auch im Bereich der normativen Rahmenbedingungen ist noch viel im Umschwung.
Die relevanten Standards für mobile und stationäre Industrieroboter befinden sich seit längerem in Überarbeitung oder haben lediglich Entwurfstatus. Es muss deshalb klar sein, dass die sichere Integration einer MRK-Anwendung, in Relation zu einer Vollautomatisierung, mit erheblichem Mehraufwand und einer gewissen Unsicherheit verbunden ist. Außerdem kann wenig auf Erfahrungswissen zurückgegriffen werden und es gibt noch keine fertigen Baukastenlösungen. Trotz dieser Hürden kann eine MRK-Anwendung sicher gestaltet werden. Es ist jedoch notwendig, sich mit den verfügbaren Technologien und Funktionalitäten auseinanderzusetzen, um deren Grenzen einschätzen zu können. So können die richtigen Komponenten ausgewählt und die Sicherheit der fertigen Anwendung garantiert werden. Stationäre sensitive Manipulatoren sind ausgereift und deren Anwendung erprobt. Auch im Bereich der mobilen Roboter werden erhebliche Fortschritte erkannt. Es wird jedoch aktuell noch nicht die Einfachheit erreicht, die stationäre Roboter bezüglich der sicheren Integration bieten.

Roboter werden in Zukunft noch intelligenter und bearbeiten schon heute komplizierte Aufgabenstellungen. Dabei wird die Interaktion mit dem Roboter zwar immer intuitiver, aber um solche Systeme zu entwickeln und einzurichten, werden immer spezifischere Kenntnisse benötigt. Dieses Muster lässt sich auch auf die Sicherheitsfunktionen von zukünftigen MRK-Anwendungen übertragen. So sind diese für die Nutzerin bzw. den Nutzer im besten Fall während dem täglichen Betrieb kaum wahrnehmbar, dafür ist die Entwicklung und Evaluierung der Systeme umso schwieriger. Durch die Beachtung der erarbeiteten Merkblätter und Checklisten können grobe Fehler vermieden werden und es wird sichergestellt, dass die wesentlichen Problemstellungen berücksichtigt sind. Eine bedeutende Rolle für eine erfolgreiche Einführung einer MRK-Anwendung spielt die Berücksichtigung der Bedürfnisse aller Mitarbeiterinnen und Mitarbeiter, die mit der Anwendung arbeiten oder auch in Kontakt kommen. Nur wenn der Mensch dem Roboter vertrauen kann, hat die Zusammenarbeit zwischen Mensch und Roboter Zukunft.
Zusammenfassung
Eine Studie des Instituts ROBOTICS der JOANNEUM RESEARCH in Klagenfurt hat sich mit Fragen der Sicherheit von sogenannten MRK-Anwendungen (Mensch-Roboter-Kollaboration) auseinandergesetzt und Handlungsempfehlungen für das Management und die Bedienerinnen und Bediener entwickelt.